- HOME
- Beyond X 最前線
- 5Gが可能にするモバイルロボティクスの活用で多品種少量生産の生産効率をアップ
5Gが可能にするモバイルロボティクスの活用で多品種少量生産の生産効率をアップ
5Gによって、モバイルでも超高速・大容量のデータ転送を低遅延で通信できるようになると、製造業におけるロボットの活用形態も変わってくるだろう。今製造の現場で求められているのは、柵で仕切られた環境で大量生産向けの作業を繰り返すだけの産業用ロボットではなく、人間と同じ環境でさまざまな作業をフレキシキブルにこなす、多品種少量生産に適した協働ロボットだ。
製造業でのモバイル通信活用はWi-Fiからローカル5Gへ
工場でワイヤレスインフラが構築できれば、ロボットが工程ラインの変更にフレキシブルに対応できるようになる。従来の有線LANで通信を行う産業用ロボットは、レイアウト変更の都度、ケーブルレイアウトを考えなければならない。通信インフラを有線からワイヤレスに切り替えれば、配線コストや設備配置換えで発生するケーブル移設費用、作業時間などが削減できる。
一方、これまで工場内でのワイヤレス通信の利用には、主にWi-Fiが採用されてきた。しかし、Wi-Fiによる通信は狭い範囲に限られるため、大規模工場などの広いエリアがカバーできなかったり、遅延も大きく、電波の漏洩によってセキュリティに不安があるなど、さまざまな課題を抱えていた。そういった課題を解決して、工場内でのワイヤレス通信環境を一新しようとしているのが5Gだ。
特に、工場では今後、SIM認証による高強度のセキュリティを実現し、1台の基地局で広範囲をカバーしながらもWi-Fiの10分1ほどの低遅延を実現する、自社専用のローカル5Gへの切り替えが進んでいきそうだ。
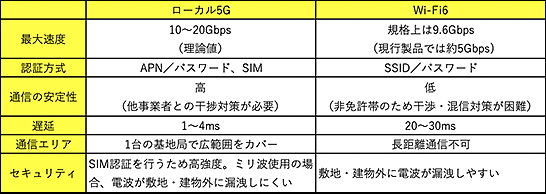
(表)ローカル5GとWi-Fiの比較
多品種少量生産を支援する自律移動可能なAGV
ローカル5Gのワイヤレス通信環境が構築できれば、無人搬送車「AGV(Automatic Guides Vehicle)」の活用範囲も広がっていくだろう。従来は部品や加工品などを運搬するために、磁気テープで決められた走行レールの上でしか動けなかったAGVも、工場内を自律的に移動できる自律移動が可能なSLAM(Simultaneous Localization and Mapping)型の普及が進んでいる。このように、自律可能なAGVの活用の幅を5Gによってさらに広げると、どのようなメリットが生まれるのだろうか。
例えば、従来、複数の装置で加工して製品を作り上げる場合、装置を並べてその間をコンベアで橋渡しして製品を移動させていた。そこに、5Gで通信できるAGVを導入すれば、各装置とAGVがリアルタイムに連携し、コンベアを使わずにロボットアームを載せたAGVで直接製品をピッキングして運べるようになる。コンベアが不要ならば、装置を一直線に並べる必要がなく固定的なレイアウトから開放され、自由度の高い工場が実現するだろう。
AVGで装置間を運ぶ順番も、製品の種類や仕様に応じてフレキシブルに変えることができるので、1つの製品にさまざまなバリエーションを持たせることが可能になる。受注状況に応じて作る製品を変えていけば、在庫削減も進むと思われる。
さらに、自律移動型AGVのコントロールをサーバ側に担わせることができれば、AGV本体に搭載する機能を少なくできる。AGVとサーバとの通信にローカル5Gのネットワークを構築し、5Gの「多数同時接続」といった特性を生かせば、複数のAGVがサーバでコントロールでき、車体の単価を下げることが可能になる。
AGVにロボットアームとカメラを取り付けて遠隔から作業
5GによってAGVの移動がフレキシブルに制御できるようになると、本体にロボットアームやカメラなどを搭載し、センターからリアルタイムに画像を確認しながら1人で複数台制御するなど、さまざまな機能が追加できるようになるだろう。
NECは甲府事業所内にローカル5G環境を構築し、ロボットを活用した製造現場のリモート化や自働化に向けた実証実験を行っている。その1つ「ピッキングロボットの遠隔操作」は、ロボットアームとカメラを取り付けたAGVを遠隔操作して、部品のピッキング作業を行う実証だ。
ピッキング位置までの移動はAGVが自律的に行うが、ピッキング作業自体は多種多様な部品が存在するためロボットアームでの自動化が難しい。そこで、AGVに取り付けたカメラの画像を見ながら、作業者が遠隔からピッキング作業を操作する。これにより、自動化と作業者の負担軽減を両立させている。
実証では、5Gで映像伝送しながら1人で2台のロボットアームを制御し、遠隔から8種の部品のピッキングを実現した。通信の遅延に関する検証においても目標遅延時間0.2秒以下を達成し、映像表示やロボット操作においてストレスなく遠隔操作できることを確認している。5Gは多数同時接続に強いため、AGVの台数を増やしても遅延なく対応できるだろう。

ローカル5Gを活用したピッキングロボットの遠隔操作の様子
(NECのプレスリリースより引用)
あわせて読みたい記事



関連するソリューション

ミライト・ワンのソリューションに関するご質問、ご相談など
ございましたらお気軽にお問い合わせください。
最新の特集

スマート防災