社会インフラをAIやドローンで効率的に運用

老朽化した社会インフラをいかに効率的に保守・更新していくのかが、全国の自治体や企業の大きな課題だ。ポイントとなる技術はセンサーやAI、ドローンなどだ。ここでは、最新の取り組みを紹介する。
高精度赤外線センサーとAI解析で上下水を調査
Essenは2月4日、豊田市つながる社会実証推進協議会の取組の一環として、豊田市上下水道局と協定を締結し、令令和8年2月3日から2月27日まで実証実験を行うと発表した。
高度経済成長期に整備された水道管路の老朽化が全国的に進行する中、法定耐用年数を超過した管路の更新や、熟練技術者の不足が深刻な課題となっている。広大なインフラ網を効率的に維持管理するためには、従来の全数調査に代わる、リスク箇所を早期かつピンポイントに判定する「スクリーニング(広域調査)」技術の導入が急務だという。
今回、Essenが行う実証実験では、車両に搭載した高精度赤外線センサーを用い、通常の走行速度で路面温度データを収集。AIが微細な温度変化を解析することで、地下の水道管の漏水等を判定する。
Essenが、車両に車載用赤外線センサーを取り付けて豊田市の指定するエリアを走行し、センサーから取得した路面温度をAIにより解析することで、水道管の漏水判定、下水道管が埋設されている道路の空洞判定、下水道マンホール周りの損傷判定の有効性について検証する。

実施イメージ(出典:豊田市)
実証実験において豊田市は、上下水道配管データ等の提供、AI判定結果に基づく現地調査(答え合わせ)、実証実験の進捗管理を行い、Essenは、路面温度取得機材(車両、赤外線センサー等)の調達、データの取得およびAI解析、各種判定、判定精度の向上に取り組むという。
ドローンで巡視・測量の運用実証
KDDIスマートドローンは2月2日、鉱山管理における安全性の向上と効率化、人手不足の解消を目指し、住友大阪セメントの岐阜鉱山(岐阜県揖斐郡大野町)において、ドローン(「Skydio Dock for X10」および「DJI Dock3」)を活用した遠隔運航サービスによる自動巡視・測量の運用実証を実施したと発表した。
この実証では、鉱山管理における巡視・測量など危険を伴う作業を、現場常設のドローンを活用した遠隔自動飛行で代替し、作業の安全性と効率性、測量精度の向上を図ることで、スマート保安を実現することを目的としている。
鉱山では、採掘現場の巡視や測量が欠かせない一方で、作業中の滑落や落石など、人命に関わる重大なリスクが伴う。加えて、鉱山労働者の減少が続き、将来的な人手不足が深刻化することが懸念されており、ドローンやIoTセンサーなどを活用した安全で持続可能な保安体制の構築が急務となっている。
実証では、岐阜鉱山の採掘終了後に残る残壁などを対象に、KDDIスマートドローンの遠隔運航サービスを活用し、特性の異なる2種類のドローンポート(「Skydio Dock for X10」および「DJI Dock3」)による遠隔自動巡視と3次元測量を実施する。2025年10月から2026年 1月にかけて継続的な運用を行い、保安業務への適用性および運用面での有効性を検証した。

本実証の全体イメージ(出典:KDDIスマートドローン)
今後は、両者が連携し、本実証で得られた知見をもとに、鉱山管理におけるドローンポートの実運用とスマート保安の実装を推進していくという。
横浜市、ローカル5Gと路側インフラを活用した自動運転走行支援
NTTドコモビジネスおよび横浜市は1月16日、自動運転バスの走行に関する実証実験を2026年1月17日から1月22日まで実施した。
本実証では、都市部で深刻化するバス運転者不足や休日の交通混雑・渋滞、また狭あい道路や見通し不良箇所での対向車両同士が安全にすれ違うための走行調整(離合制御)などの課題に対し、通信制御技術と路車協調技術を組み合わせた新たな自動運転モデルの構築を目的としている。
よこはま動物園ズーラシア周辺では、休日の来園者による交通渋滞や入庫待ち車列が発生し、安全で効率的なバス運行を支える新たな交通モデルが求められているという。
こうした背景を踏まえ、NTTドコモビジネスおよび関係各社は、通信制御(無線リソース最適化)と路車協調(ローカル5G・路側インフラ連携)を融合し、「都市部における混雑発生地域や見通しの悪い狭あい道路でも安定して運行できる自動運転レベル4」の社会実装を目的とした検証を行う。
具体的には、NTTが研究開発している「マルチ無線プロアクティブ制御技術」である「Cradio」による無線通信電波品質予測とハンドオーバー制御で通信切断や劣化を最小限に抑える。また、NTTが推進する6G時代の通信・コンピューティング基盤技術であるISA(Instruction Set Architecture:命令セットアーキテクチャ) による通信量制御で映像遅延や画質劣化を抑えることを検証。さらに、最適化技術を適用し、都市部の変動する通信環境下でも車両制御に必要な情報を安定的に伝送できることを確認する。
そのほか、データ処理をクラウドではなく通信網の近くで行うことで通信遅延を低減し、セキュリティも高められるドコモのエッジ型プラットフォームdocomo MEC上および遠隔監視装置でのリアルタイム映像処理を行う。これにより、バス車内の状況を統合監視し、1名の監視員で2台の車両を同時に遠隔監視可能な体制を構築する。そして、監視業務の省人化・効率化を図るとともに、将来的な複数車両同時運行モデルの実現性を検証する。
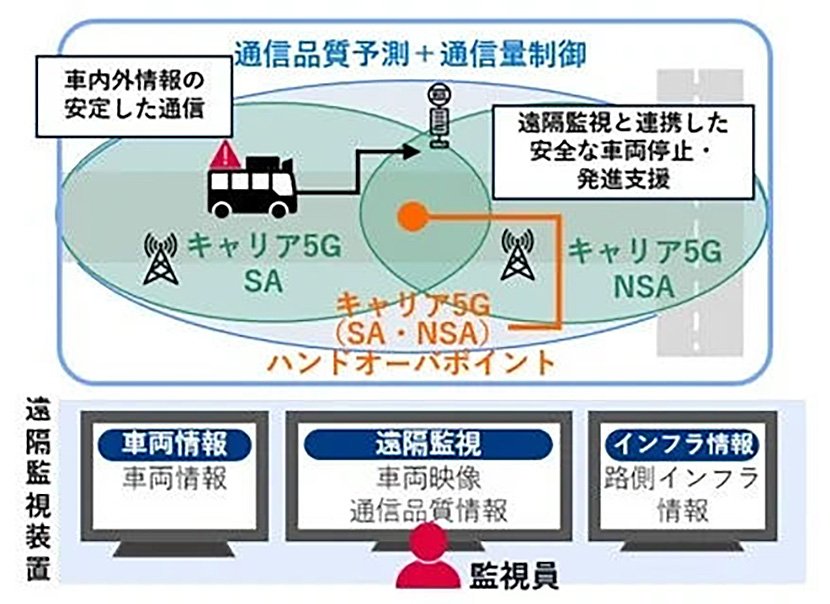
本通信環境イメージ(出典:NTTアドバンステクノロジ)
また、狭あい道路や見通し不良区間における、安全かつ円滑な自動運転走行を支援する通信・制御基盤も検証。
ローカル5Gサービスとキャリア5Gを併用し、車両と路側インフラ(LiDAR(レーザー光を使って対象物までの距離や形状を正確に計測するセンサー技術)・カメラ・スマート道路灯)との間で双方向通信を行い、これらのセンサー情報をMEC上で統合・リアルタイム処理し、自動停止・減速・離合判断を車両制御に反映させることで、見通し不良区間や狭い区間での安全通行を可能にする。また、見通不良の交差点や駐車場出入口における他車を即時に把握し、他車を回避する通行を可能にする。

本実証に使われたバス(出典:NTTアドバンステクノロジ)
今後両者は、本実証を通じて、都市部における自動運転バス運行の安定化・効率化に必要な通信制御および路車協調技術の有効性、および安全安心な監視業務のオペレーションを検証。得られた知見は横浜市のみならず、同様の交通課題を抱える他都市においても活用可能な知見として整理し、全国各地の都市型自動運転モデルの社会実装に向けて展開を図るという。
あわせて読みたい記事



関連するソリューション



ミライト・ワンのソリューションに関するご質問、ご相談など
ございましたらお気軽にお問い合わせください。
最新の特集

スマート防災