- HOME
- Beyond X 最前線
- 産業用ロボット大国・日本はフィジカルAIでも存在感を出せるか
産業用ロボット大国・日本はフィジカルAIでも存在感を出せるか
AIのトレンドは、人間の代わりに文章や画像、動画を創り出す「生成AI」から、自律的に仕事をこなす「AIエージェント」や現実の空間で機械が状況を認識して動作する「フィジカルAI」へと進化している。フィジカルAIとは、AIが現実空間の状況を認識し、判断し、機械やロボットの動作に反映する仕組みを指す。日本ではとりわけ、労働力不足の深刻化や熟練技能の継承難、安全対策の高度化といった課題が、フィジカルAIの導入を後押ししているようだ。すでにものづくりの現場でロボットが活躍している日本で、フィジカルAIはどのように広がっていこうとしているのか。
日本のロボットの強みとフィジカルAIでの出遅れ
これまで、日本は産業用ロボット(単一作業特化型ロボット)の分野において、高い技術力と長年の実績に裏打ちされ、世界シェアの約7割を占める圧倒的な優位性を誇ってきた(「2023年度 日系企業のモノとITサービス、ソフトウェアの国際競争ポジションに関する情報収集(NEDO)」より)。特に精密制御や耐久性、故障の少なさ(安定稼働性)で世界をリードしており、製造業の基盤として欠かせない存在となっている。だが、従来の産業用ロボットはティーチングプレイバック(人間がロボットに直接動作を覚えさせる制御手法)が主流であり、各動作にティーチングが必要になるため、導入コストが高く、環境変化への柔軟性がないといった課題を抱えてきた。
日本は産業用ロボットで長年培ってきた技術で強みを持ちながらも、次の成長領域である多用途ロボットやサービスロボットでは出遅れが目立つ。最大の課題は、ハードとソフトを一体で作り込む従来型の発想から脱却しきれていない点にある。世界では、AIを中核に据えてロボットの知覚、判断、行動を統合する開発が進み、未知の環境への柔軟な対応や短期間での学習が可能になっている。日本は高精度な個別最適の技術には強いものの、オープンな開発環境やモジュール化、人材とデータが循環するエコシステムの形成で米中に遅れを取っている状況だ。
日本がフィジカルAIの遅れを取り戻すには、どのような課題があるのか。とりわけ深刻なのは、フィジカル分野での学習データの不足だ。フィジカルAIは現実空間で動くため、画像や言語だけではなく、物体の重さや摩擦、接触、失敗事例といった膨大な実環境データが必要になる。しかし日本では、こうしたデータを業界横断で共有し、基盤モデルの性能向上につなげる仕組みがまだ弱い。その結果、個社ごとの実証にとどまり、汎用化やスケールが進みにくい。
海外と比べると資金面でも差が大きく、米中では巨大テック企業や自動車メーカー、半導体企業、スタートアップに巨額資金が流れ、商用化を前提に研究開発と量産投資が進んでいる。これに対し、日本のスタートアップは調達規模で見劣りする。今後は、強い製造業基盤を土台に、オープンなデータ基盤と開発環境、資金調達の体制を整え、産業用ロボットの優位を次世代のAIロボティクスへ接続できるかが勝負になるだろう。
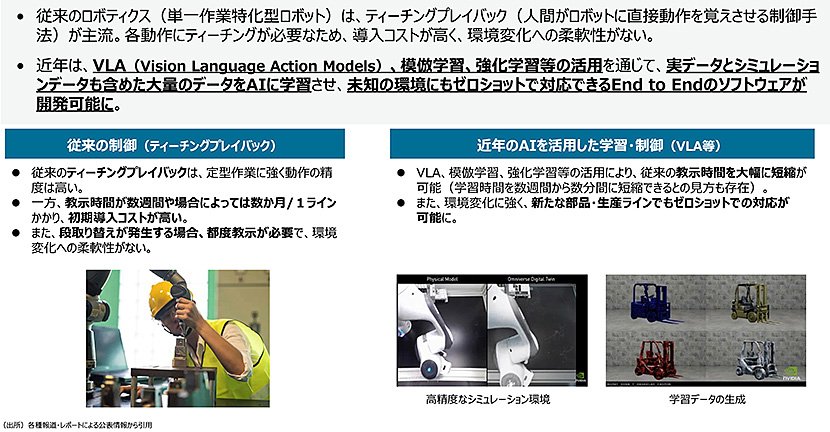
(図1)日本のロボティクスの課題(出典:「経済産業省 AIロボティクス検討会参考資料」より引用)
物流・製造・建設で進む日本のフィジカルAI活用
そうした中でも、日本では現在、物流と製造の分野でフィジカルAIの活用が進もうとしている。物流の分野での代表例として挙げられるのが、MUJINの取り組みだ。同社は3次元ビジョンとモーションプランニングを組み合わせ、商品のピッキングやトラックへの積み下ろしといった複雑な作業を自動化してきた。特に物流現場では荷姿が崩れ、段ボールの大きさが混在し、作業条件が絶えず変わる。こうした環境では、AIが物体を認識し、把持方法や経路をその都度調整できるフィジカルAIが必要になってくる。
一方、製造業では、FANUCとPreferred Networksの連携も注目を浴びている。両社は工場内の設備データを活用するプラットフォーム「FIELD(FANUC Intelligent Edge Link and Drive) system」を通じて、異常検知や予兆保全、品質安定化に向けたAI活用を進めてきた。AIが機械の振動や温度、加工条件のばらつきを学習し、設備停止や品質変動の兆候を早期に捉えることで、単なる見える化にとどまらない現場制御へ踏み込もうとしている。
フィジカルAIの対象は、工場や倉庫の内部だけにとどまらない。建設分野においても、コマツが「SMART CONSTRUCTION」を軸に、建機の稼働データやドローン測量、施工計画データを組み合わせ、土工の進捗管理や施工の効率化を進めている。建設現場は天候や地形、工程変更の影響を受けやすく、完全な定型環境とは程遠い。そのため、現場状況をセンシングしながら機械制御や作業計画に反映する考え方は、今後のフィジカルAI活用の重要な方向性といえる。危険作業の削減や省人化だけではなく、施工品質の平準化や燃料消費の抑制まで含めて効果を測る動きも広がっている。

(写真1)MUJINのAI制御による荷物搬送のイメージ(出典:MUJINのプレスリリースより引用)
フィジカルAIで日本が競争力を高めるには
このように、日本でもさまざまな分野でフィジカルAIの事例が増えているが、前述のような課題をどう解決していけばよいのだろうか。そこに立ちはだかる壁は、大きく3つあると考える。第一の壁は、現場ごとに設備構成や作業手順が大きく異なり、導入モデルの横展開が難しいことだ。第二の壁は、安全性と責任分野の整理である。AIが動作を判断する機械は、誤認識や通信断、センサー汚損が起きた際にも安全側に倒れる設計が欠かせず、ログ監査や設定のロールバック、緊急停止の権限設計まで含めた運用が求められる。第三に、費用対効果の説明も重要だ。省人化だけでは投資判断が難しい現場では、停止時間の削減、事故リスクの低減、エネルギー効率の改善、技能継承への寄与といった複数の指標で効果を示す必要がある。
海外では、Amazonが倉庫ロボットの高度化を進め、NVIDIAはロボット学習向けのシミュレーション基盤を強化し、シーメンスやABBが産業オートメーションとAIの統合を加速させている。これに対して、日本企業の強みは、現場の複雑な制約条件を知り尽くし、止められない工程の中で段階的に実装できる点にある。今後は、生成AIによる指示理解と、ロボットの認識・制御をつなぐ基盤モデルの進化、デジタルツイン上で学習した結果を実機に反映する仕組み、クラウドとエッジを組み合わせた低遅延制御が普及の鍵を握るとみられる。
一方で、日本は新しい技術などの導入に慎重なため、実証実験までは進んでも全社展開や量産化に時間がかかりやすい。また、現場ごとにデータが分断され、AIソフトウェア人材やスタートアップへの大型投資も不足しがちで、ハードの強さを継続的な学習基盤へつなげる点が弱い。今後、日本がフィジカルAIの分野で競争力を高めるには、開発の主体を分散化(モジュール化)し、データ標準化や人材育成、PoC後の事業化支援、運用しながら学習を続ける仕組みづくりなどが重要になりそうだ。
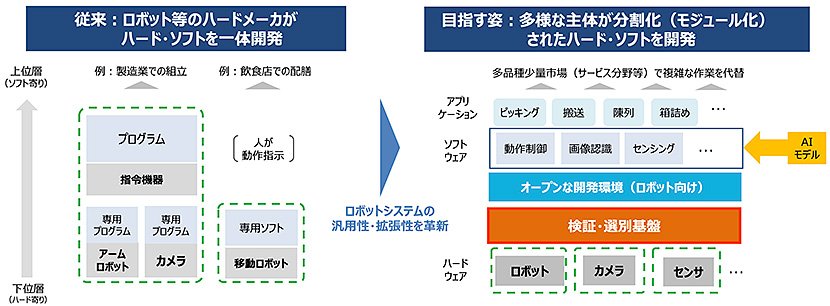
(図2)日本のフィジカルAI普及で目指すべき姿(出典:「経済産業省 AIロボティクス検討会参考資料」より引用)
あわせて読みたい記事



関連するソリューション



ミライト・ワンのソリューションに関するご質問、ご相談など
ございましたらお気軽にお問い合わせください。
最新の特集

スマート防災