ヒューマノイドロボットとは?今知るべき種類・活用分野・日本企業
目次
- ▼1. ヒューマノイドロボットとは
- ▼2. ヒューマノイドロボットの3つの特徴
- ・人と同じ環境で共通の道具を使って作業できる
- ・トレーニングデータを用いて人の行動を学習する
- ・幅広いタスクに対応できる
- ▼3. 二足歩行だけじゃない!ヒューマノイドロボットの種類
- ▼4. 仕組みはどうなっている?ヒューマノイドロボットを支える技術
- ・強化学習
- ・Sim2Real
- ▼5. なぜ今?ヒューマノイドロボットが注目される3つの理由
- ・ロボット基盤モデルの進化
- ・AI技術の進展
- ・製造コストの低下
- ▼6. 【4分野】ヒューマノイドロボットの活用が期待される領域
- ・製造業
- ・サービス業
- ・医療・介護
- ・災害現場
- ▼7. 【日本】ヒューマノイドロボットを開発する企業一覧
- ▼8. 実用化への壁|ヒューマノイドロボットの課題と限界
- ▼9. これからはどうなる?ヒューマノイドロボットの今後の展望
- ▼10. まとめ
ヒューマノイドロボットとは、人の形や動作を模し、自律的に判断・行動できる次世代型ロボットのことである。近年、AIやセンサーなどの進化を背景に開発が加速しており、2025年は「大量生産元年」とも呼ばれた。製造業をはじめ、サービス業、医療・介護など幅広い分野への導入が検討されている。
本記事では、ヒューマノイドロボットの基本的な仕組みや特徴、活用が期待される分野、現状の課題と今後の展望をわかりやすく解説する。
ヒューマノイドロボットとは
ヒューマノイドロボットとは、人の形状や動作、能力を参考に設計されたロボットのことで、自律的に判断しながら行動できる点が特徴である。一般的には二足歩行型を指すケースが多く、日本語では「人型ロボット」と呼ばれる場合もある。ただし、厳密な定義が統一されているわけではない。
経済産業省の「ロボット政策研究会」(2006年)では、そもそもロボットを以下のように定義している。
| ◾ロボットの定義 "本研究会では、「ロボット」を、「センサー、知能・制御系、駆動系の3つの要素技術を有する、知能化した機械システム」として、広く定義することとする。" 引用:ロボット政策研究会 報告書|経済産業省 |
ヒューマノイドロボットは、その中でもさまざまな用途に対応できる「多用途ロボット」に分類される。
従来の産業用ロボットは、工場の生産ラインなど特定の作業に特化したものが中心であった。一方、ヒューマノイドロボットは、人と同じ環境で作業できるよう設計されている点が特徴である。具体的には、工場でのピッキング作業や搬送作業、物流現場でのコンテナ移動など、幅広いタスクへの活用が期待されている。
なお、ヒューマノイドロボットの研究は、1990年代から大学や企業を中心に進められてきた。その後、技術の進展によって2020年代前半から実用化へ移行している。2025年は「ヒューマノイドロボットの大量生産元年」と呼ばれ、製造業やサービス業をはじめ、さまざまな分野から注目を集めている。
ヒューマノイドロボットの市場規模について詳しくは、以下の記事で解説している。
ヒューマノイドロボットの3つの特徴

ヒューマノイドロボットは、人の動きを学習しながら多様な業務へ対応できるようになりつつある。ここでは、ヒューマノイドロボットの代表的な3つの特徴を紹介する。
●人と同じ環境で共通の道具を使って作業できる
●トレーニングデータを用いて人の行動を学習する
●幅広いタスクに対応できる
人と同じ環境で共通の道具を使って作業できる
ヒューマノイドロボットは、人が使う設備や道具を活用しながら、同じ環境で作業できる点が特徴のひとつである。
人に近い動作を実現するために、ヒューマノイドロボットには次のような技術が搭載されている。
●エンドエフェクター:人の手のように器用に動く多指ロボットハンド
●アクチュエーター:人間の関節に近い動きを実現するための駆動装置
●センサー:周囲の状況や物体の硬さ、位置など、外部環境を検知するための技術
こうした技術により、自動車工場の組立ラインや物流倉庫、飲食店など、人と同じ環境で共通の道具を使って作業できるようになる。
従来の産業用ロボットは単体では動作せず、他の装置と組み合わせて設置されるケースが一般的だった。一方、ヒューマノイドロボットは、人が使用するために設計された道具や環境をそのまま活用できるため、設備やレイアウトの変更を最小限に抑えやすい点がメリットといえる。
トレーニングデータを用いて人の行動を学習する
ヒューマノイドロボットの特徴として、トレーニングデータを活用しながら、人の行動・判断を学習する点が挙げられる。
ロボット向けのトレーニングデータは、実際の動作データなどを新たに収集・生成する必要がある。
トレーニングデータは、収集方式によって「リアルデータ」と「合成データ」に大別できる。それぞれの収集方法と概要を次の表で見てみよう。
| 種類 | リアルデータ | 合成データ |
| 収集方法 | 人間の動作データや、遠隔操作したロボットのセンサー情報など、実環境で取得 | シミュレーション環境やアルゴリズムを活用して人工的に生成して取得 |
| 概要 | ・実際の動作に基づくため精度や信頼性が高い ・機密性の高い情報も含まれる場合がある |
・現実のデータを模倣して人工的に作られたデータ ・低コストで大量生成しやすく、危険環境のデータも作成可能 |
リアルデータが集めづらい場合に合成データも用いることで、学習精度を高められるようになる。
幅広いタスクに対応できる
ヒューマノイドロボットは、単一用途ではなく、複数の業務に柔軟に対応できる点も特徴である。現時点では、工場での搬送業務やピッキング作業など、比較的反復性の高いタスクへの活用が中心となっている。
これまでのロボットは、特定業務に特化したロボットが主流であった。しかし今後は、技術の進展に伴いヒューマノイドロボットのような多用途ロボットの普及が期待されている。
ただし、人間により近い動きを再現するには、機械システムと制御システムを高度に連携する必要があり、実用化には一定の時間がかかると考えられている。
そのため、現段階では特化型ロボットを活用しながら、省人化や業務効率化を図ることが重要である。
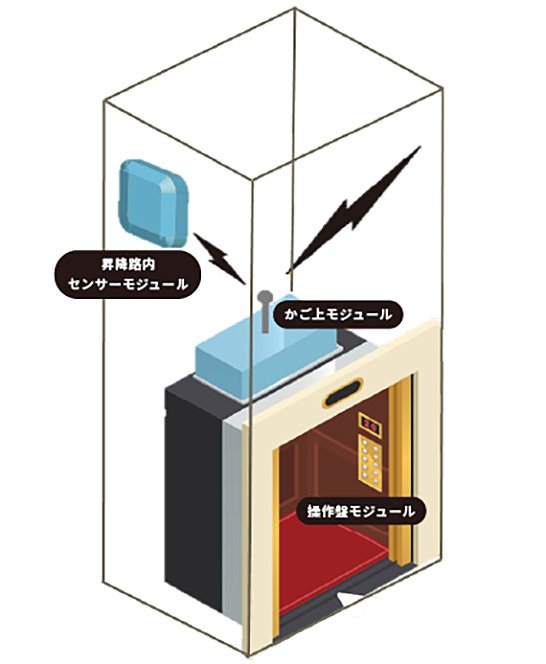
株式会社ミライト・ワンは、エレベータ連携で自律的にフロア間を移動し、清掃や配送など特定の業務を行うロボットの導入サポートを提供している。通信機能付きのアダプタをエレベータに後付けすることで、従来の方法では困難だったロボットとのスムーズな連携を実現している。
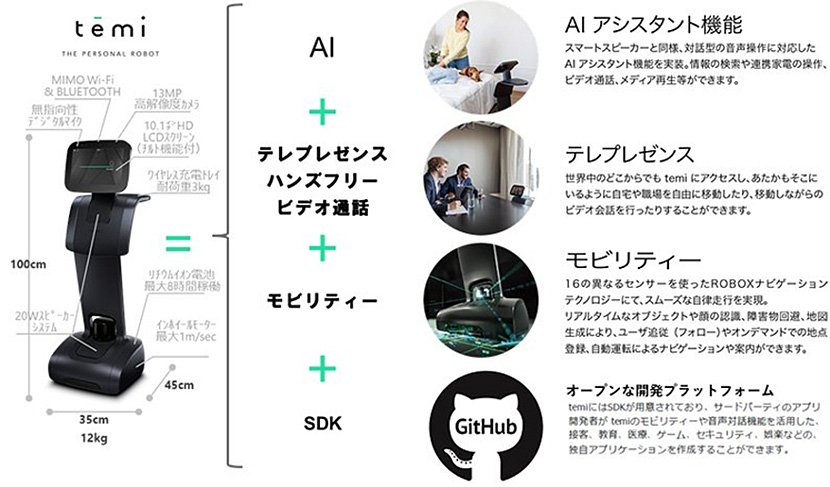
また、ロボットを遠隔操作してゲストの案内や説明、誘導、施設内巡回などを行う「AI コミュニケーションロボット"temi"」も展開している。ホテルや病院、行政施設などに導入することで、新しい接客体験や業務効率化の実現につながるだろう。
各ソリューションについて詳しくは、以下のリンクをチェックしてみてほしい。
二足歩行だけじゃない!ヒューマノイドロボットの種類
ヒューマノイドロボットといえば二足歩行をイメージする人も多いかもしれないが、実際にはいくつかの種類がある。
ここでは、ヒューマノイドロボットの代表的な種類として「二足歩行型」と「車輪移動型」の特徴を紹介する。
| 種類 | 二足歩行型 | 車輪移動型 |
| 特徴 | ・二足・両腕を備えた人間に近い構造 ・自律的に歩行しながら、人のために設置された環境で幅広い作業に対応する |
・車輪によって移動する構造 ・平坦地で効率的・安定的に移動できる ・ロボットによって、運搬に加えて音声対話も可能 |
二足歩行型は、センサーによって人や障害物などを検知・回避しながら自律的に歩行が可能である。ロボットによっては、階段や段差も認識して歩幅を自動で調整できる。
また、平坦地で長距離の移動が必要な場合には、効率的に移動できる車輪移動型の活用が想定されている。車輪移動型は、物流倉庫や工場など広い環境での利用が期待できるだろう。
仕組みはどうなっている?ヒューマノイドロボットを支える技術
ヒューマノイドロボットの実用化に向けて、さまざまな技術が採用されている。ここでは、強化学習とSim2Realを紹介する。
強化学習
歩行動作の習得に活用されているのが強化学習である。
強化学習とは、ロボットが試行錯誤を繰り返しながら、成功した動作に対し「報酬」を与えることで、最適な動作を自ら見つけ出していく仕組みのこと。具体的には、強化学習を適用して次のような動作を学習できる。
●目標速度に応じた歩行
●障害物がある環境でもバランスを保った歩行
これはゲームを何度もプレイしながら攻略方法を覚える感覚に近く、試行錯誤を重ねることで自然な動作へ近づけていく。
ただし、実際のロボットを動かして何度も転倒させながら学習させることは現実的ではない。そのため、学習の大部分はコンピューター上の仮想空間(シミュレーション環境)で行われている。
Sim2Real
Sim2Realとは、シミュレーション環境で学習・検証した技術を、現実世界へスムーズに適用するためのアプローチである。例えば、ロボット分野におけるSim2Realは、ロボットのモーター駆動部(アクチュエーター)を実際に動作させ、取得したデータをもとにシミュレーターを調整する役割を担う。
これは、フライトシミュレーターの操縦感覚を本物の飛行機に合わせる作業に近い。仮想空間が現実に忠実であるほど、シミュレーション上で学習した歩行動作をロボットへ反映しやすくなる。
そもそもシミュレーション環境では、仮想空間と現実世界に差異が生じるケースがある。シミュレーション上では正常に動作していても、実際のロボットは同じように動けないことも少なくない。
Sim2Realは、こうした仮想空間と現実世界の差異を埋めるために活用されている。
なぜ今?ヒューマノイドロボットが注目される3つの理由
日本政府は、国民が豊かに暮らすための「ムーンショット目標」において、汎用自律人型AIロボットの実現を掲げている。2030年までに、工場や病院・介護施設、家庭、災害現場などで活躍するヒューマノイドロボットの実現をめざし、開発要素の基礎を確立するというものである。
こうした国による推進に加え、近年はロボット基盤モデルやAI技術の進展、製造コストの低下なども進んでいる。これにより、ヒューマノイドロボットの実用化に向けた動きが加速しつつある。
ここでは、ヒューマノイドロボットが注目される3つの理由を解説する。
●ロボット基盤モデルの進化
●AI技術の進展
●製造コストの低下
ロボット基盤モデルの進化
近年、ロボット基盤モデルの急速な進化により、ヒューマノイドロボットの開発が加速している。
従来のロボット開発では、ロボットの判断や行動、知覚などのプロセスごとに個別のソフトウェアを組み合わせて制御する必要があった。そのため状況の理解と動作をシームレスに連携できず、柔軟な対応が難しかった。
しかし、現在はVLMやVLAのようなロボット基盤モデルが登場し、統合処理が実現している。VLMとVLAの概要を、以下の表で見てみよう。
| 種類 | 概要 |
| VLM(Vision-Language Model) | 視覚情報を認識し、言語と結びつけて処理するモデル |
| VLA(Vision-Language Action) | 視覚・言語理解に加えて、行動制御まで行うモデル |
VLMは、ChatGPTやGeminiのように、画像(視覚情報)を理解し、「何が写っているか」を言語で処理・説明できるモデルである。
一方、VLAは、VLMに「行動(Action)」の機能を加えたモデルを指す。物理的なアクションができるようになる点が特徴で、「どのように動くか」を計算し、ヒューマノイドロボットを動作させることができる。
例えば医療・介護現場では、「薬剤をナースステーションへ運ぶ」といった指示に対し、周囲の状況を確認しながら目的地まで自律的に運搬するロボットの活用が期待されている。
AI技術の進展
AI技術の進展も、ヒューマノイドロボット開発の加速に貢献している。
従来、現実世界から大量のデータを収集し、学習へ活用するまでに多大なコストと時間が必要となっていた。また、実際のロボットを用いた学習には転倒による故障リスクも伴っていた。
現在、仮想空間上で多数のヒューマノイドロボットをシミュレーションしながら学習させる技術が進んでいる。強化学習と組み合わせることで、スムーズな歩行や障害物回避など、複雑な動作を効率的に学習できる環境が整備されつつある。
AI技術の活用により開発速度も向上し、ヒューマノイドロボットの実用化に向けた研究が加速している。
製造コストの低下
ヒューマノイドロボットの製造にはこれまで高額なコストがかかっていたが、製造コストは低下傾向である。
従来、1台あたり数千万円規模の製造コストが必要になるケースも少なくなかった。しかし、バッテリーやセンサー、本体材料などの価格低下により、量産が可能なレベルに近づいてきている。
こうした背景から、2025年は「ヒューマノイドロボットの大量生産元年」と呼ばれるまでに至った。今後も製造コストの低下が進むことで、製造業やサービス業など幅広い分野で導入が進む可能性がある。
【4分野】ヒューマノイドロボットの活用が期待される領域
ヒューマノイドロボットは、人と同じ環境で作業できることから、さまざまな分野での活用が期待されている。ここでは、4つの活用領域を紹介する。
●製造業
●サービス業
●医療・介護
●災害現場
製造業
製造業では、人手不足への対応や作業効率化を目的として、ヒューマノイドロボットの導入が検討されている。
自動車工場や石油化学工場で、ヒューマノイドロボットに任せられるタスクの例を見てみよう。
| ◾自動車 ●部品の作業台へ小さい物の配置 ●エンジンの搭載位置への物の運搬 ●ボトル位置の確認 ●部品箱のライン間での運送 ◾石油化学 ●試薬瓶の配置 ●容器の持ち上げ ●シリンダー搬送 |
ヒューマノイドロボットがこうしたタスクを補完できれば、人手不足の解消や総人件費の低減、安全性の向上などにつながる可能性がある。
サービス業
サービス業では、接客や案内業務などにヒューマノイドロボットの活用が想定されている。
例えば、来店客へのメニュー説明や施設案内、受付対応など、人とのコミュニケーションを伴う定型業務を任せられる。音声対話に加え、ダンスパフォーマンスや出迎えの演出などを行うケースもある。
ヒューマノイドロボットの導入によって、待ち時間の短縮やスタッフの負担軽減につながるだけでなく、SNSで話題にされることで集客効果も期待されている。
なお、万能なヒューマノイドの普及を待たずとも、接客やコミュニケーションの領域ですぐに導入・活用できる場合もある。株式会社ミライト・ワンが導入をサポートする「AI コミュニケーションロボット"temi"」が、その一例である。詳しくは、以下のリンクをチェックしてみてほしい。
医療・介護
医療・介護分野では、医療従事者や介護スタッフの業務を補完する役割として、活躍が期待されている。
例えばリハビリ支援では、ヒューマノイドロボットがトレーニング動作を実演し、患者がその動きを模倣しながらリハビリを行う取り組みが進められている。ロボットは患者の動作を分析・評価するケースもある。
また、政府によるムーンショット事業では、高齢者の寝返り介助を支援するヒューマノイドロボットの研究開発も進められている。将来的には、ヒューマノイドロボットの活用によって介護スタッフの負担軽減と患者のQOL(生活の質)向上につながる可能性がある。
災害現場
災害現場では、人が立ち入りにくい危険区域での活用が求められている。
例えば、被災した建築物の内部へヒューマノイドロボットを遠隔操作で投入すれば、搭載カメラやセンサーを用いて被害状況を確認できるようになる。瓦礫や障害物の多い環境でも、人に近い動作によって復旧支援を行えるだろう。
こうした技術を支えているのが「フィジカルAI」である。これは、カメラやセンサーを通じて物理世界を認識し、人のように状況判断や行動を行う技術を指す。
フィジカルAIについて詳しくは、以下の記事をチェックしてみてほしい。
【日本】ヒューマノイドロボットを開発する企業一覧
日本でも、自動車メーカーや重工業メーカーを中心に、ヒューマノイドロボットの研究開発が進められている。代表的な企業は、以下の通りである。
| 企業名 | ヒューマノイドロボットの名称 | 特徴 |
| トヨタ自動車 | T-HR3 | ・遠隔操作でも人のようにしなやかに動く ・5本指で構成された手で、複雑なタスクを行う ・シミュレーション技術を活用し、強度を保ったままで従来モデルと比べて軽量化を実現 |
| 川崎重工業 | Kaleido9 | ・従来モデルと比べて構造が強化され、バランスを崩しても脚を素早く出して転倒を回避 ・周囲の環境を認識し、自律歩行を実施 ・単純作業はAIに、高度作業は人が遠隔操縦するハイブリッド運用が可能 |
| ソフトバンクロボティクス | Pepper | ・音声対話ができ、家庭や商業施設、介護施設などで活用されている ・世界初の量産型ヒューマノイドとしてギネス世界記録™に正式認定 ・接客モデル「Pepper+」にはAI接客エージェントを搭載し、接客現場で購買意欲を高める対話を実施 |
| 日立製作所 | EMIEW | ・多言語で情報を提供し、接客ができる ・人との自然なコミュニケーションを行う小型ロボット |
日本企業は、産業用ロボットの開発・製造に長年取り組んできた実績を持つ。これまで培った技術やノウハウをベースに、人と協働するヒューマノイドロボットの実用化に向けて、各企業で取り組みが進められている。
実用化への壁|ヒューマノイドロボットの課題と限界
ヒューマノイドロボットの開発は進んでいる一方で、実用化においては技術面でさまざまな課題が残されている。
例えば、理想的なヒューマノイドロボットでは軽量・高出力・高精度を同時に満たす必要があるが、現状では困難とされている。特に人の手のような柔軟性は再現が困難で、細かい操作の精度は人に及ばない。また、バッテリーの搭載スペースが限られているため、エネルギーの消耗が激しい点も懸念される。
AI技術に関する課題も存在する。ヒューマノイドロボットには深層学習に基づくAIが搭載されているが、その判断プロセスはブラックボックス化しやすい。そのため、問題が発生した際に原因究明が難しく、安全性や信頼性の確保に課題があると考えられる。
今後、ヒューマノイドロボットが普及するには、ハードウェアの性能向上に加えて、安全性を担保するためのAI技術の開発も求められる。
これからはどうなる?ヒューマノイドロボットの今後の展望
ヒューマノイドロボットは、これまで学術分野を中心に試験導入が行われていたが、最近では製造業や空港、駅構内など、実社会でも有用性が確認されている段階にある。
人と協働できる場面はまだ限られているが、今後はサービス業や医療・介護など、幅広い分野での活用が期待されている。ヒューマノイドロボットが普及することで、人材不足の解消や業務負担の軽減につながるだろう。
また、「ヒューマノイドロボットは人の仕事を奪うのではないか」という懸念の声もある。現場従事者からは不安や抵抗感が生じるケースも少なくない。
そのため、単に人の仕事を置き換えるのではなく、人がすべき業務とロボットが支援する業務を切り分けながら活用していくことが重要になる。人とロボットが協働できる新しい社会システムや労働環境の構築が求められているといえるだろう。
なお、ロボティクスの最新動向については、以下の記事もチェックしてみてほしい。
関連リンク
ロボティクスの最新動向
まとめ
ヒューマノイドロボットは、人と同じ環境で作業できる次世代ロボットとして、製造業やサービス業、医療・介護、災害現場など幅広い分野で活用が期待されている。
しかし、動作精度やバッテリー性能、安全性などの課題も残されている。今後は、ハードウェアやAI技術のさらなる進展に加え、人とロボットが協働できる環境づくりも企業に求められる。
ヒューマノイドロボットの本格的な普及には一定の時間を要すると考えられるが、現時点では特定業務を支援するロボットの導入が進められている。株式会社ミライト・ワンは、エレベータと連携して自律移動を行うロボット導入支援や、「AI コミュニケーションロボット"temi"」を活用した接客・案内ソリューションを提供している。
ロボット活用による業務効率化や新たな顧客体験の実現を検討している場合は、ぜひ以下のリンクをチェックしてみてほしい。
あわせて読みたい記事


関連するソリューション



ミライト・ワンのソリューションに関するご質問、ご相談など
ございましたらお気軽にお問い合わせください。
最新の特集

スマート防災